-
라즈베리파이를 이용한 자율주행 자동차SW/Project 2018. 2. 23. 19:00
자율주행자동차
1. 개요
자율주행자동차 키트와 센서를 사용하여 아래와 같은 트랙을 빠져나오는 프로젝트
2. 개발 과정
자동차 키트를 사용하고 초음파 센서 3개를 사용했다.
하드웨어 조립
조립

측면

앞

처음에는 앞과 왼쪽에 초음파 센서를 사용하여 left hand알고리즘을 사용하려고 하였으나 오른쪽에 부딪힐 경우 예외처리로 빠져나오기 위해서 오른쪽도 센서를 달아 3개를 사용하였다.
PID제어
float ki,kp,kd;int speed=0,pre_speed=0,cnt=0;float err=0;float i=0;float d=0,p=0;float lsterr=0;float pivot;p=kp*err;i=i+ki*err;d=(err-lsterr) * kd;
PID제어 데이터를 뽑은 결과 다음과 같이 나왔다.
초흠파거리센서가 0.001초 마다 가져와서 제대로된 제어가 안되는 거라고 판단해서 0.1초마다 가져오기위해 메인에 슬립을 주었다.
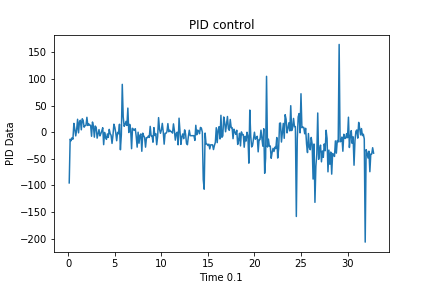
그 결과 제어가 좀더 가능해 졌다.
처음에는 제어를 잘했지만 뒤쪽에는 직선 구간이 부딪히는 상황이 생겨서 값이 뛰어 제어가 잘 안되는 것을 볼 수 있다.
게인값 -> kp=4 ki=0.0002 kd=25
코드
코드 부분은 모터 동작(직진,후진,왼쪽,오른쪽턴)을 함수로 구현하였다.
모터의 하드웨어적 문제가 발생하여(왼 바퀴가 더 센데 초기값을 주면 굴러가지가 않음) 순간적으로 255의 값을 PWM을 주어서 왼쪽 바퀴를 굴길 수 있게 하였다.
쓰레드를 3개 사용하여 각각의 초음파센서의 값을 받아오도록 하였다.
메인에는 발생할 상황을 조건문으로 나누어서 각각의 상황에 맞에 구현하였다.
초음파 센서가 받아오는 값이 너무 빨라서 제어를 좀더 정확하게 하기위해서 0.1초의 딜레이를 주었다.
시연 동영상 (클릭)
제어 처음 부분

3. 결과
최종 시연 동영상 (클릭)

4. 사용기술
C
라즈베리파이 & 초음파 센서
pigpiod 라이브러리
PID 제어
Raspberry Pi 스마트 로봇 자동차 키트 RPi 4 B 및 SD PiCar-S 모듈 기반 그래픽 비주얼 프로그래밍 언어
COUPANG
www.coupang.com
아두이노 초음파 거리 센서 모듈 HC-SR04 DM453
COUPANG
www.coupang.com
파트너스 활동을 통해 일정액의 수수료를 제공받을 수 있음
'SW > Project' 카테고리의 다른 글
[C/C++] OPENGL 실시간 그래프 그리기 (0) 2018.08.01 오목고 (0) 2018.02.01 채용알림서비스 만들기 (0) 2018.01.05